
其实,世上本没有密不透风的墙。专利文献蕴含了大量的技术信息,专利制度作为一种能够垄断市场的权利,申请人在就技术方案谋求保护的同时,也被要求披露技术方案。美国专利尤其规定,专利申请人必须在专利申请文件中披露其已知的实施发明的最佳模式(即最佳实施例),一旦被发现隐瞒信息,将会导致专利权的不可执行。从美国专利商标局(USPTO)最新公开的专利文献中,可以看出苹果公司布局自动驾驶核心技术的野心。
一、“自主导航系统”专利技术近期遭披露
2017年12月,美国专利商标局公开了苹果公司的一项自动驾驶专利,这项专利为US20170363430“自主导航系统”(Autonomous navigation system,申请日2015-12-4,公开日2017-12-21)。
在行驶过程中,车辆能根据行驶路线的特征进行自主导航。这些路线特征是有关路线的一组驱动规则,它们由监视路线的(一个或多个)车辆的导航系统所识别、开发,并在车辆行驶过程中进行实时更新。这些路线特征被车辆传输到远程系统中,由该系统对数据进行处理并不断完善导航特性。

资料来源:US20170363430
该专利描述了让自动驾驶汽车导航更高效的方法,减少了不断重复制作详细地图的需要。不同于许多其它自动驾驶车辆系统基于静态信息(如地图)进行导航,并使用传感器识别变化特征的做法,苹果的这项专利技术将优先使用存储在本地的数据而非外部设备提供的数据来监控导航。
二、在获准路测之前,“任意多边形障碍物的避让”专利技术已被公开
在2016年底写给美国国家高速公路监管机构的信中,苹果首次承认正在“重金布局机器学习和自动驾驶系统”。随后在2017年4月,美国加利福尼亚州机动车管理局更新的记录显示,苹果公司获得了在加州公路上测试自动驾驶汽车的许可证。苹果所获的自动驾驶测试许可证涉及3辆2015年版的“雷克萨斯”RX SUV和6名驾驶人员。与此同时,一辆白色的雷克萨斯RX450h SUV被发现从苹果大楼离开,从曝光照片可以看到,这辆车上安装了各种各样的传感器、摄像头以及雷达设备。传感器包括了Velodyne Lidar公司的64-channel激光雷达、至少不少于2个雷达以及大量的摄像头。

资料来源:ipadown
其实在此之前的2016年年底,美国专利商标局(USPTO)公开的一项专利已经曝光了苹果公司研发的自动驾驶相关技术,经检索发现,这项专利为US2016358485“任意多边形障碍物的避让”(Collision avoidance of arbitrary polygonal obstacles)(申请日:2015-06-07,公开日2016-12-08),由苹果公司申请。
根据该发明公开的技术方案,防撞系统以每秒60次的速度更新实时路况,通过探测一定范围内的障碍物并计算距离,可以使车辆在路况不熟的地方行驶,有效躲避碰撞。当检测路径范围内出现障碍物并有碰撞可能时,系统自动选择最短路径,计算出改变现有路径所需动力,及时避开障碍物。同时,历史躲避记录将被保留,作为下一次操作的参考。
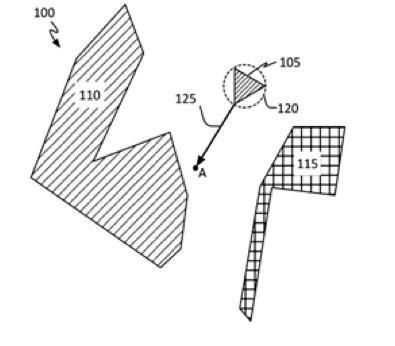
资料来源:US2016358485
这个防撞系统能够识别二维和三维空间的物体,用于避免凹或者凸的物体,不管该物体是静止的还是移动的。对于自动驾驶汽车而言,确定障碍物的边缘并加以躲避是非常重要的。自动驾驶系统通常需要一定的时间通过摄像头或者其他传感器来检测前方的道路状况,这其中需要强大的数据处理器、复杂的检测和躲避算法,而苹果这项新的防撞系统能够大大简化这方面的计算。
三、除了专利,揭示核心技术的还有论文
就在1个月前,苹果公司罕见地发表了一份关于自动驾驶技术的论文,此文具有重要意义。这篇名为“VoxelNet:基于点云的端到端学习的三维物体检测”(VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection)的研究论文由苹果公司的两位科研人员Yin Zhou和Oncel Tuzel于2017年11月17日在独立在线杂志arXiv 发表。苹果公司科研人员提出了一种新软件检测方法—VoxelNet,可帮助计算机检测三维物体。
自动驾驶汽车通常将常规二维摄像头和深度感应的“激光雷达”结合使用,以感知周围世界。尽管这些传感设备可提供丰富的信息,但其分辨率低。而且如果没有常规摄像头与其实时连接,这些传感设备很难检测到远距离的小物体。但苹果公司科研人员表示,其研发的新软件效果惊人,仅靠激光雷达数据就可辨认行人和骑自行车的人。

资料来源:VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection
苹果公司科研人员在该文中写道,其研发的软件仅靠激光雷达就可检测到三维物体,优于其它检测方法。但这些实验是同过计算机模拟完成的,尚未进行路测。在这份11月17日发布于在线期刊《arXiv》的论文中,苹果研究人员详细阐述了苹果自动驾驶技术是如何探测行人和自行车的。尽管目前该技术只是进行过计算机模拟测试,但是研究人员在论文中表示,他们认为VoxelNet的性能要大幅优于目前最先进的基于LiDAR 3D探测方法。

资料来源:VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection
学者们习惯与其它机构的同行自由分享彼此工作。为跟随这一趋势,苹果公司在今年7 月为其研究人员创办了苹果机器学习期刊(Apple Machine Learning Journal)。在此之前,苹果公司科研人员尚未公开发表任何关于自动驾驶汽车方面的研究报告。

 相关文章
相关文章


 精彩导读
精彩导读 热门资讯
热门资讯 关注我们
关注我们
